- Teacher: HADID SAMIRA
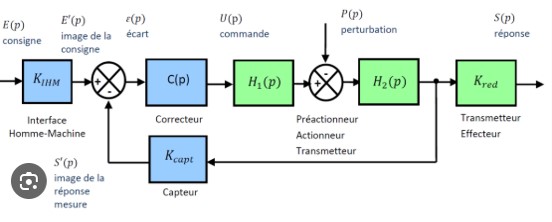
Ce cours présente les principes fondamentaux de l'asservissement des systèmes dynamiques linéaires.
Les principaux thèmes abordés sont :
– Modélisation et représentation des systèmes.
– Réponses temporelles et fréquentielles.
– Stabilité et performances.
– Réglage et synthèse des régulateurs (PID).
Des travaux dirigés et des simulations sous MATLAB/Simulink permettront de consolider les concepts abordés et d'illustrer les méthodes de conception des régulateurs.
- Teacher: Mecheri Belgacem
- Teacher: Omar BENDJEGHABA